Κανόνες Εργαστηρίου

![]()

Βασικές Οδηγίες
SID 2023
Safe Internet Day
|
|

BBC microbit: Follow the line rover.
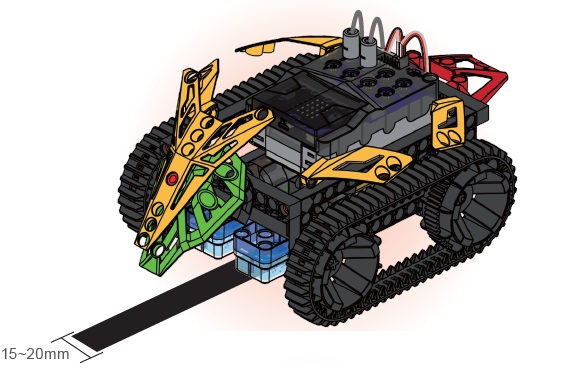
To rover είναι ένας συνηθισμένος τύπος ρομποτικού οχήματος το οποίο με την βοήθεια κατάλληλων αισθητήρων που διαβάζουν το περιβάλλον γύρω του, μπορεί να κινείται μόνο του. Το όχημα που θα κατασκευάσουμε χρησιμοποιεί δυο αισθητήρες οι οποίοι διαβάζουν το φως που αντανακλάται από την επιφάνεια του δαπέδου.
Το κόλπο είναι ότι σύμφωνα με τη φυσική το μαύρο χρώμα απορροφά το περισσότερο φως που δέχεται με αποτέλεσμα να αντανακλάται λίγο φως προς τον αισθητήρα του rover. Αντίθετα το λευκό χρώμα αντανακλά περισσότερο φως. Με βάση αυτή την παρατήρηση, οι αισθητήρες του rover παρακολουθούν μια μαύρη λωρίδα η οποία είναι η διαδρομή που ακολουθεί το όχημά μας και όταν κάποιος από αυτούς αντιληφθεί ότι το φως που μετρά είναι λιγότερο ή περισσότερο στέλνει το κατάλληλο σήμα στο microbit και σύμφωνα με αυτό το ερέθισμα το πρόγραμμα που θα δημιουργήσουμε θα δίνει την κατάλληλη εντολή στους κινητήρες για διόρθωση της πορείας.
Σύνδεση με Υπολογιστή και προγραμματισμός microbit:
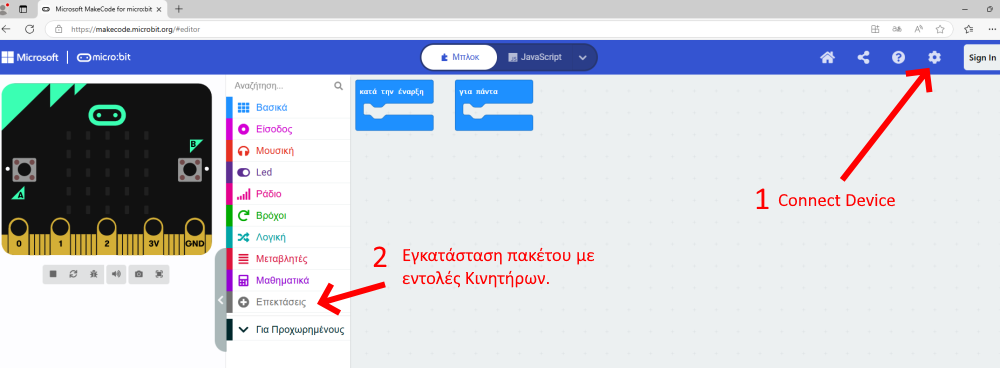
| 1 Microsoft Edge >> makecode.microbit.org
|
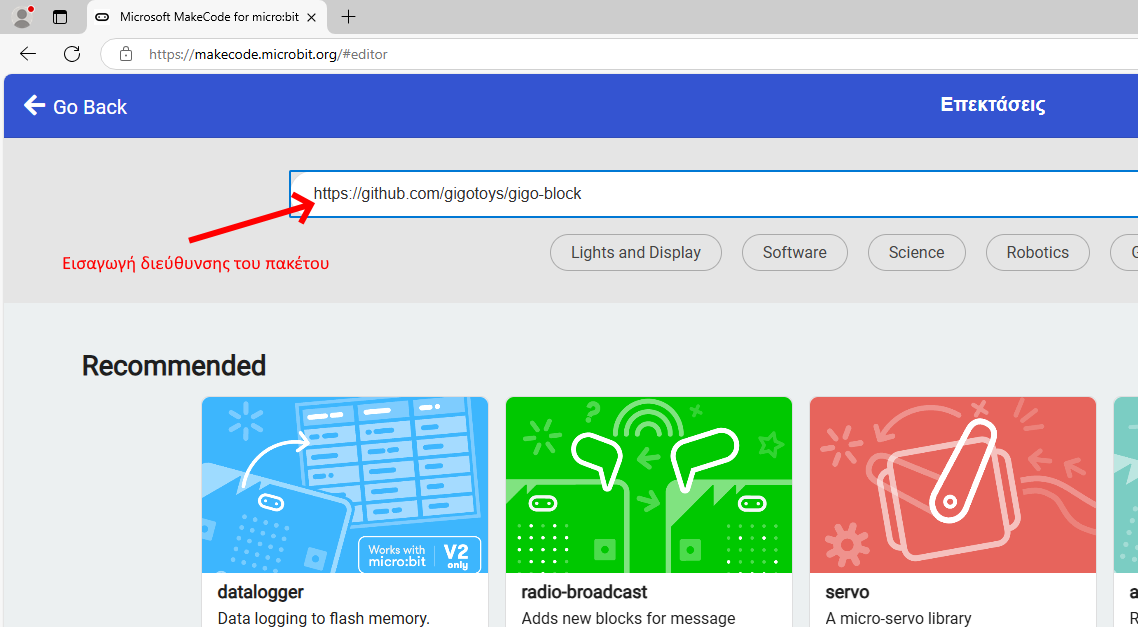
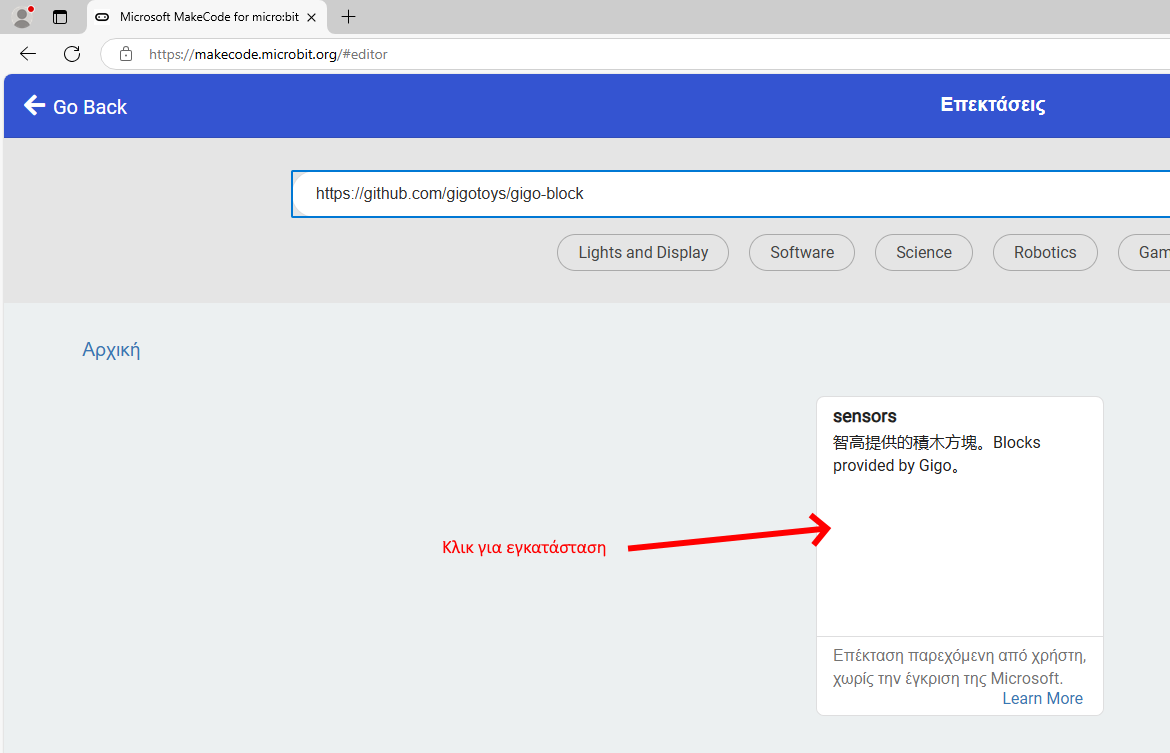
2 Επεκτάσεις...
|
| 3 Εισάγετε την διεύθυνση https://github.com/gigotoys/gigo-block
|
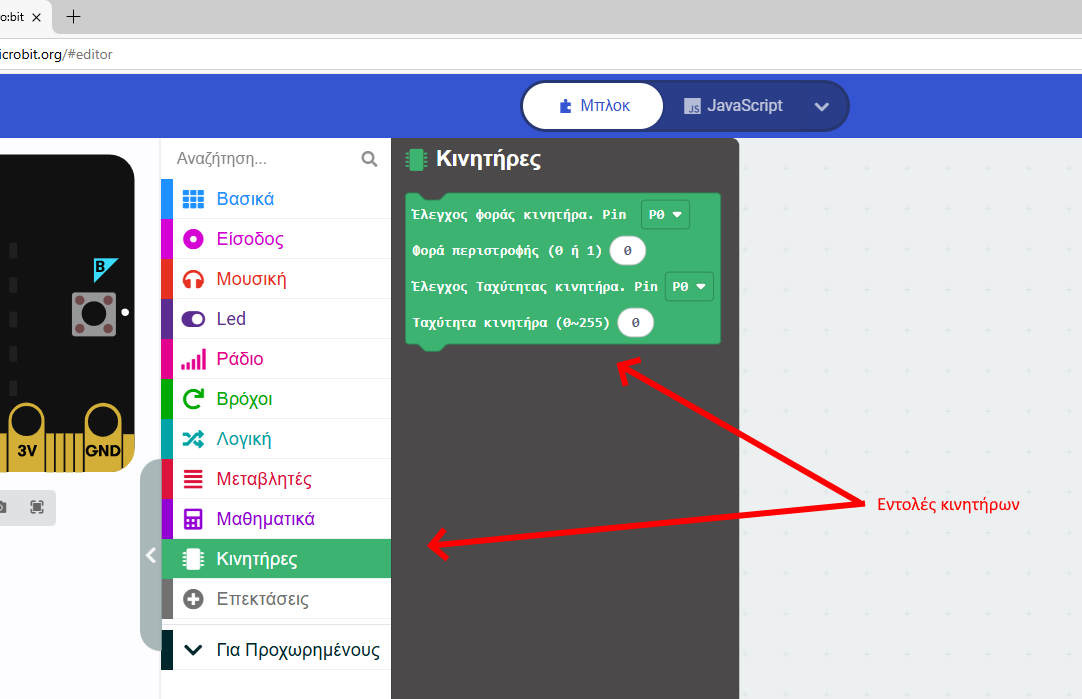
4 Εντολές για χρήση των κινητήρων. |
5 Δημιουργία υπο-προγράμματος τύπου Συνάρτησης.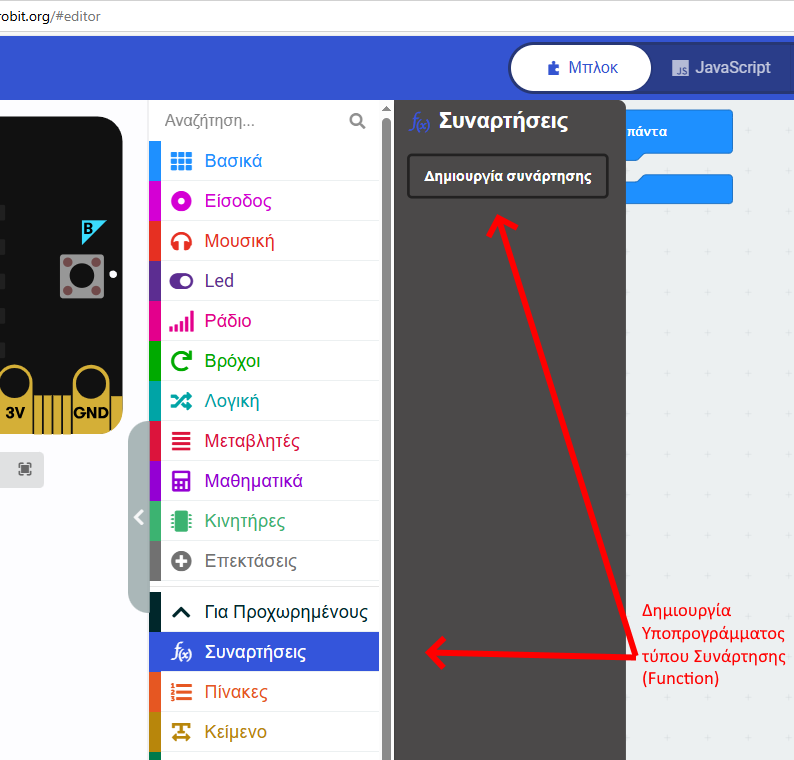 |
6 Υπο-πρόγραμμα για κίνηση εμπρός.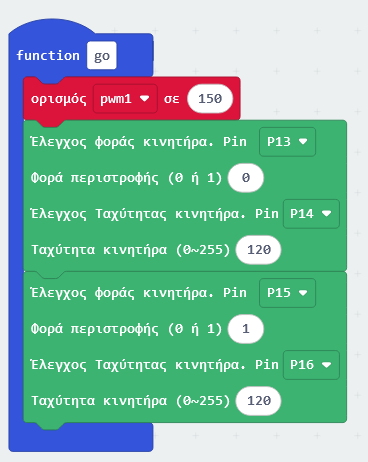 |
7 Υπο-πρόγραμμα για στροφή αριστερά.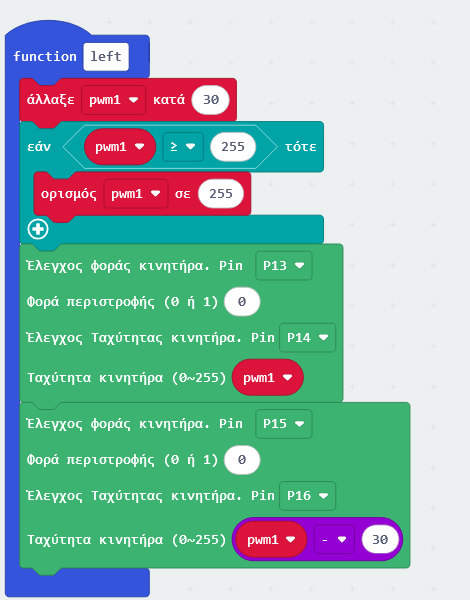 |
8 Υπο-πρόγραμμα για στροφή δεξιά.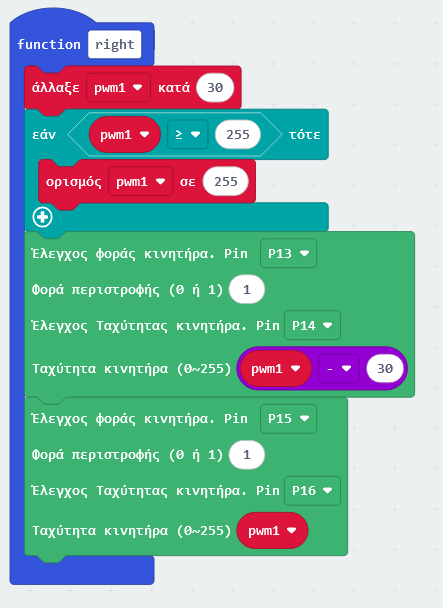 |
9 Υπο-πρόγραμμα για Stop.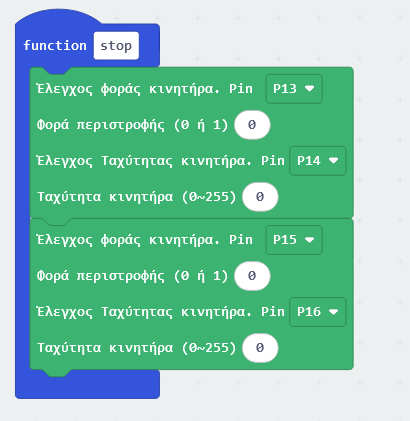 |
{kind=link}
10 Κύριο Πρόγραμμα που ελέγχει την κίνηση του robot.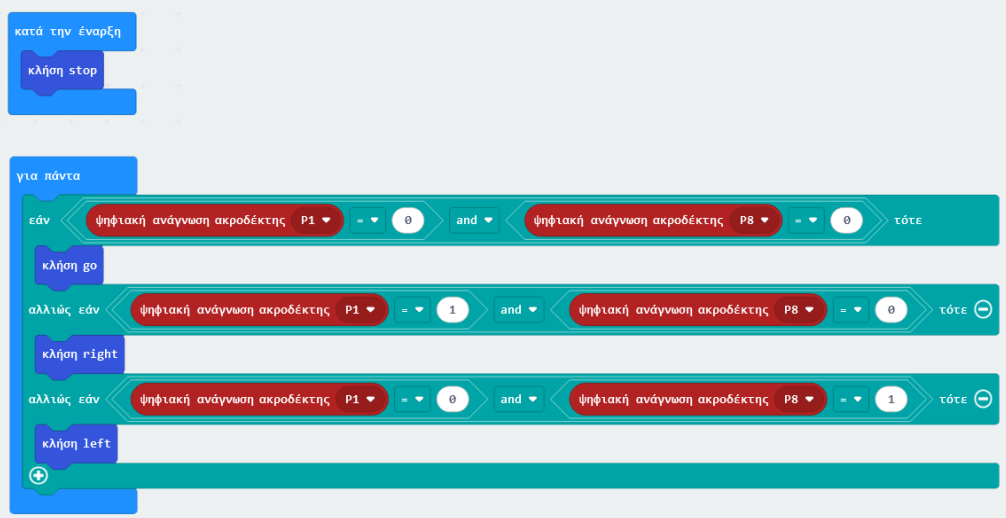
- Δημιουργήστε ένα πρόγραμμα που να κάνει το robot Rover να κινείται κάνοντας ένα τετράγωνο με πλευρά 60 εκατοστά.
