Κανόνες Εργαστηρίου

Parcce
ERASMUS+ KA2
Για μαθητές
|
|
![]()

Βασικές Οδηγίες
SID 2023
Safe Internet Day
|
|

{kind=link}
BBC Micro:bit πρόγραμμα που βασίζεται σε γεγονότα.
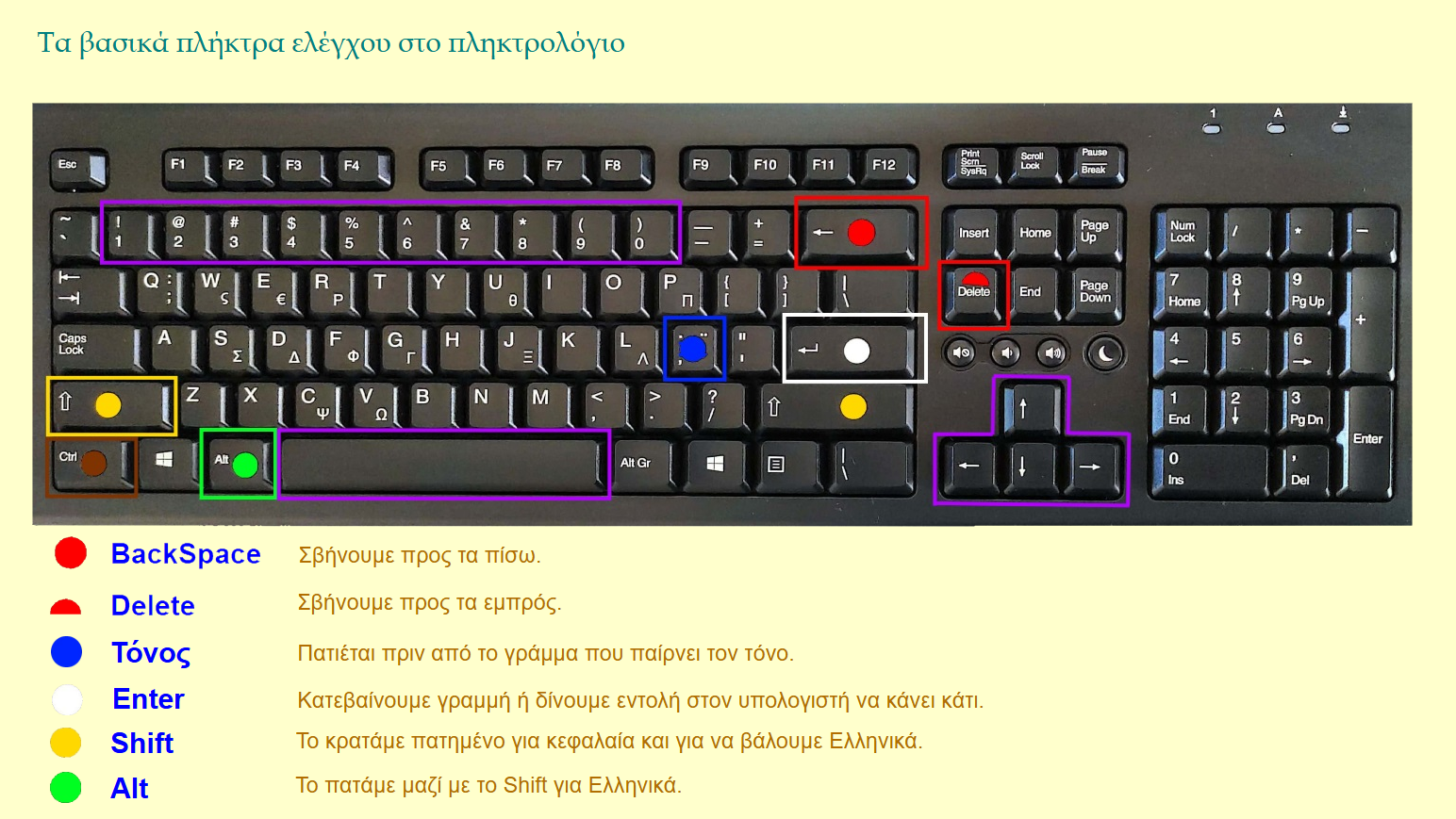
 Το micro:bit έχει μια οθόνη 5x5 εικονοστοιχείων (pixels). Κάθε εικονοστοιχείο είναι στην ουσία μια φωτοδίοδος (Light Emmiting Diode ή LED). Η οθόνη μπορεί να απεικονίσει κείμενο και απλά γραφικά. Αν το κείμενο που θέλουμε να απεικονίσουμε είναι μεγαλύτερο από ένα χαρακτήρα, το κείμενο «κυλάει» από τα δεξιά προς τα αριστερά μέχρι να απεικονιστούν όλοι οι χαρακτήρες.
Το micro:bit έχει μια οθόνη 5x5 εικονοστοιχείων (pixels). Κάθε εικονοστοιχείο είναι στην ουσία μια φωτοδίοδος (Light Emmiting Diode ή LED). Η οθόνη μπορεί να απεικονίσει κείμενο και απλά γραφικά. Αν το κείμενο που θέλουμε να απεικονίσουμε είναι μεγαλύτερο από ένα χαρακτήρα, το κείμενο «κυλάει» από τα δεξιά προς τα αριστερά μέχρι να απεικονιστούν όλοι οι χαρακτήρες.
Το micro:bit έχει 2 φυσικά πλήκτρα που ονομάζονται A και B. Μπορούμε να χρησιμοποιήσουμε μπλοκ που ενεργοποιούνται από κάποια ενέργεια (μπλοκ ενεργειών) για να προσδιορίσουμε αν ο χρήστης πάτησε το πλήκτρο Α, το πλήκτρο Β ή και τα δύο πλήκτρα ταυτόχρονα και να εκτελέσουμε διαφορετικές λειτουργίες βασισμένοι σε αυτό.
| Ένα πρόγραμμα που αντιδρά σε κάτι που κάνει ο χρήστης, όπως το να πιέσει ένα κουμπί, να κάνει κλικ στην οθόνη κλπ. είναι ένα πρόγραμμα που βασίζεται σε γεγονότα (event driven program). Αυτού του είδος ο προγραμματισμός κυριαρχεί στις διαδραστικές εφαρμογές στις οποίες ο χρήστης αλληλεπιδρά με το πρόγραμμα (παιχνίδια, μέσα κοινωνικής δικτύωσης, ιστοσελίδες κλπ.) και το συναντάμε στους επιτραπέζιους υπολογιστές, τα κινητά τηλέφωνα και τις ταμπλέτες. |
BBC Micro:bit ο αισθητήρας φωτός.
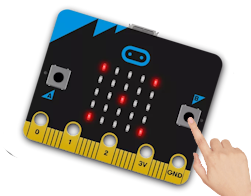
Η οθόνη από 5x5 led που έχει το micro:bit είναι επίσης και ένας αισθητήρας φωτός που μπορεί να ανιχνεύσει 256 διαφορετικά επίπεδα φωτισμού από 0 (λιγότερο φως) έως 255 (περισσότερο φως).
Για να δούμε καλύτερα την λειτουργία του αισθητήρα φωτός ως πηγή εισόδου δεδομένων για το micro:bit θα δημιουργήσουμε ένα απλό πρόγραμμα με μια μεταβλητή που θα λέγεται light1 και θα δέχεται την τιμή του αισθητήρα φωτός. Στη συνέχεια θα συγκρίνει την τιμή αυτή με τις τιμές 50, 100, 150 και αναλόγως θα φωτίζει περισσότερα ή λιγότερα LED, ώστε να φαίνεται σαν ήλιος που μεγαλώνει ή μικραίνει.
BBC microbit: Φανάρι διάβασης πεζών.
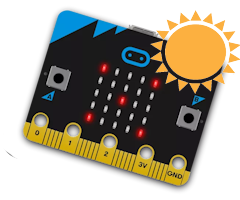
Η κατασκευή αυτή βασίζεται σε έναν αισθητήρα αφής που λειτουργει σαν είσοδος δεδομένων (ή σαν ειδοποίηση προς το σύστημα) όταν κάποιος πεζός φθάσει στην διάβαση και τον πιέσει. Ο αιθητήρας αυτός όταν πατηθεί στέλνει σήμα στο microbit το οποίο εκτελεί το πρόγραμμα που θα δημιουργήσουμε και το οποίο με τη σειρά του ενεργοποεί μια σειρά γεγονότων όπως την εμφάνιση των κατάλληλων οπτικών και ηχητικών σημάτων στην οθόνη και στο ηχείο, την ενεργοποίηση των κατάλληλων led του φαναριού για συγκεκριμένο χρόνο και το χρονομέτρημα, ώστε οι πεζεί να αντιλαμβάνονται τον χρόνο που τους απομένει και πότε πρέπει να περάσουν τηη διάβαση.
BBC microbit: Follow the line rover.
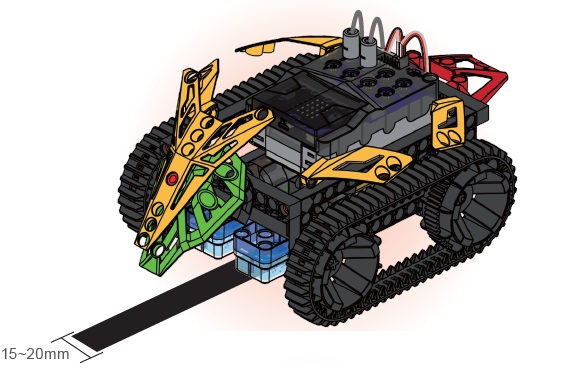
To rover είναι ένας συνηθισμένος τύπος ρομποτικού οχήματος το οποίο με την βοήθεια κατάλληλων αισθητήρων που διαβάζουν το περιβάλλον γύρω του, μπορεί να κινείται μόνο του. Το όχημα που θα κατασκευάσουμε χρησιμοποιεί δυο αισθητήρες οι οποίοι διαβάζουν το φως που αντανακλάται από την επιφάνεια του δαπέδου.
Το κόλπο είναι ότι σύμφωνα με τη φυσική το μαύρο χρώμα απορροφά το περισσότερο φως που δέχεται με αποτέλεσμα να αντανακλάται λίγο φως προς τον αισθητήρα του rover. Αντίθετα το λευκό χρώμα αντανακλά περισσότερο φως. Με βάση αυτή την παρατήρηση, οι αισθητήρες του rover παρακολουθούν μια μαύρη λωρίδα η οποία είναι η διαδρομή που ακολουθεί το όχημά μας και όταν κάποιος από αυτούς αντιληφθεί ότι το φως που μετρά είναι λιγότερο ή περισσότερο στέλνει το κατάλληλο σήμα στο microbit και σύμφωνα με αυτό το ερέθισμα το πρόγραμμα που θα δημιουργήσουμε θα δίνει την κατάλληλη εντολή στους κινητήρες για διόρθωση της πορείας.
BBC microbit: Hungry dino.
Μάθετε πώς να φτιάξετε ένα ασύρματο χειριστήριο παιχνιδιών με το micro:bit και το Scratch - και βοηθήστε να τροφοδοτήσετε tacos στον δεινόσαυρο σας!